Makecode for 4tronix M.A.R.S. Rover
Installing the Extension
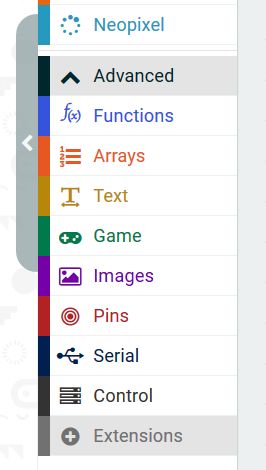
In the Makecode editor, select “Advanced” and then “Extensions”. Alternatively click on the gear icon and select “Extensions” from there

Then enter Rover or Mars Rover in the seach bar

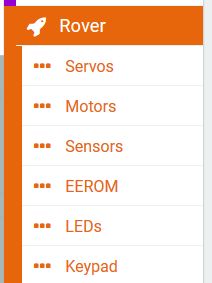
Click on the extension and it will be loaded into your Makecode editor. You will now have a rocket ship icon, Rover, with several sub-sections
Calibrating the Servos
Before we start using the Rover we should calibrate the servos so that they run directly.
Load this project into your Makecode editor: https://makecode.microbit.org/_Mpt6xpCRF0EK by selecting “Import”, then “Import URL”
Alternatively, download it from https://4tronix.co.uk/rover/microbit-CalibrateServos.hex
This program goes round all the wheel servos and allows you to use the A and B buttons on the Microbit to set each servo to straight ahead position.
It indicates using the LEDs which servo is being calibrated.
When you are happy with each servo, press the A+B buttons together to store the setting and move onto the next servo. After setting all servos, simply switch off and start coding.