AGoBo is the winning name – Suggested by @mcambelluni
Mark will receive a complete AGoBo prototype, as well as the next iteration of the main PCBA.

Starting 29th November 2014 and finishing 1st December, we are running a Twitter based competition to choose a product name for this new robot, codenamed APB01
The winner will receive a complete prototype robot, including the Model A+ and we will ship it worldwide.


Specification
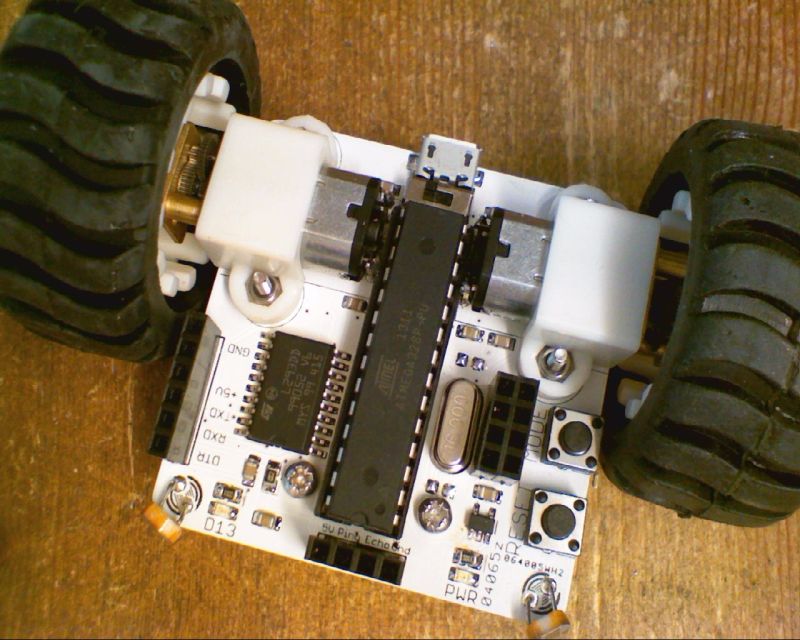
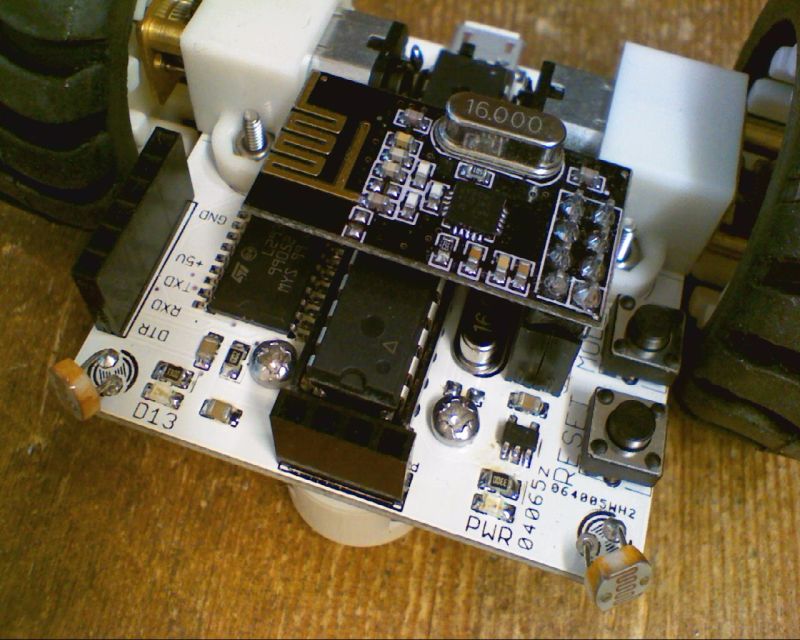
This is a prototype robot at the moment, and we expect the specification to change before we start selling it in January. Current specs as follows:
- Supports Raspberry Pi Model A+ only
- Size 100 x 80 25mm (excluding wheels)
- Built-in power supply that works from 6.6V to 12V quite happily, supplying power to both the robot and the Pi
- Serial connections (for SSH console cable) brought to convenient connector on the edge
- Standard 4tronix 6-pin I2C breakout connector – direct fit for the IP Display module we make
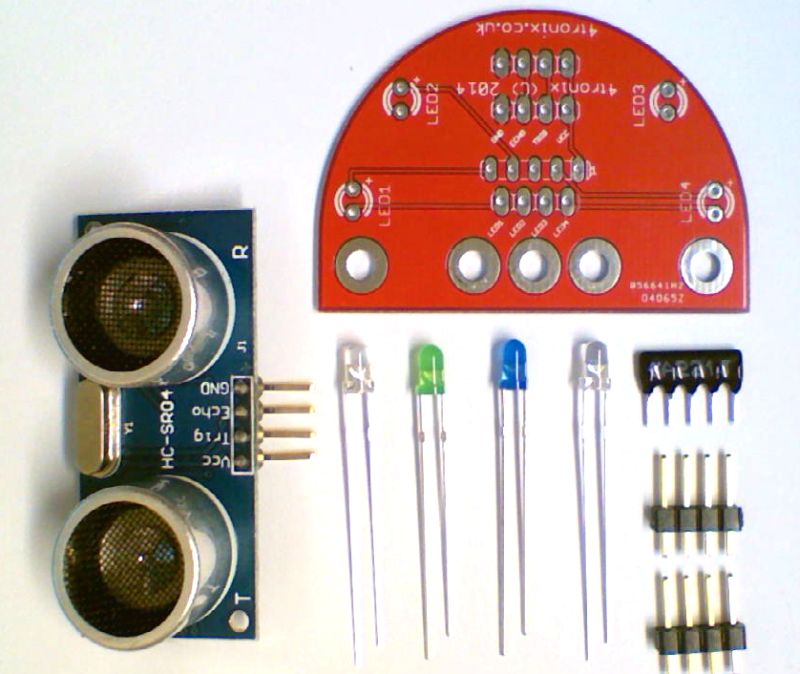
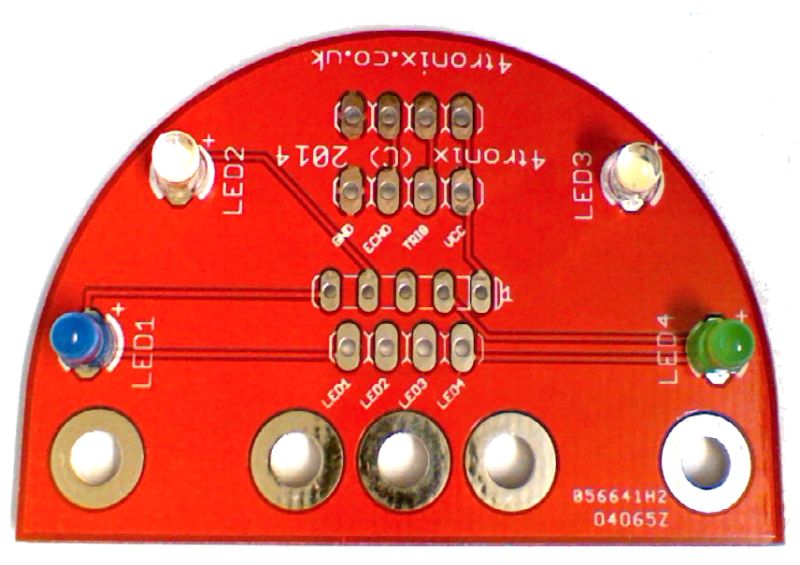
- 2 x line follower sensors with indicator LEDs
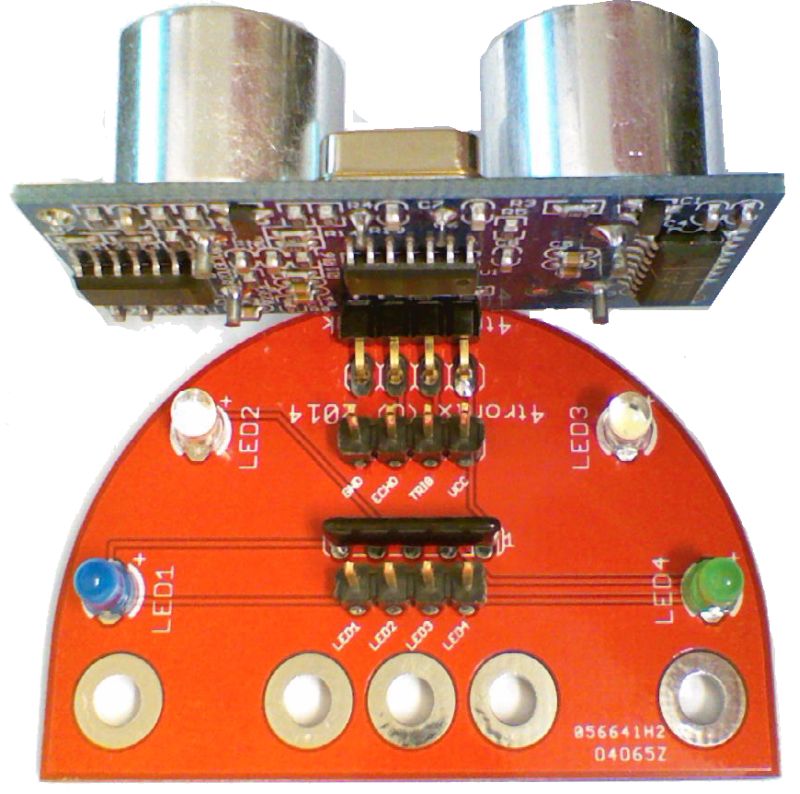
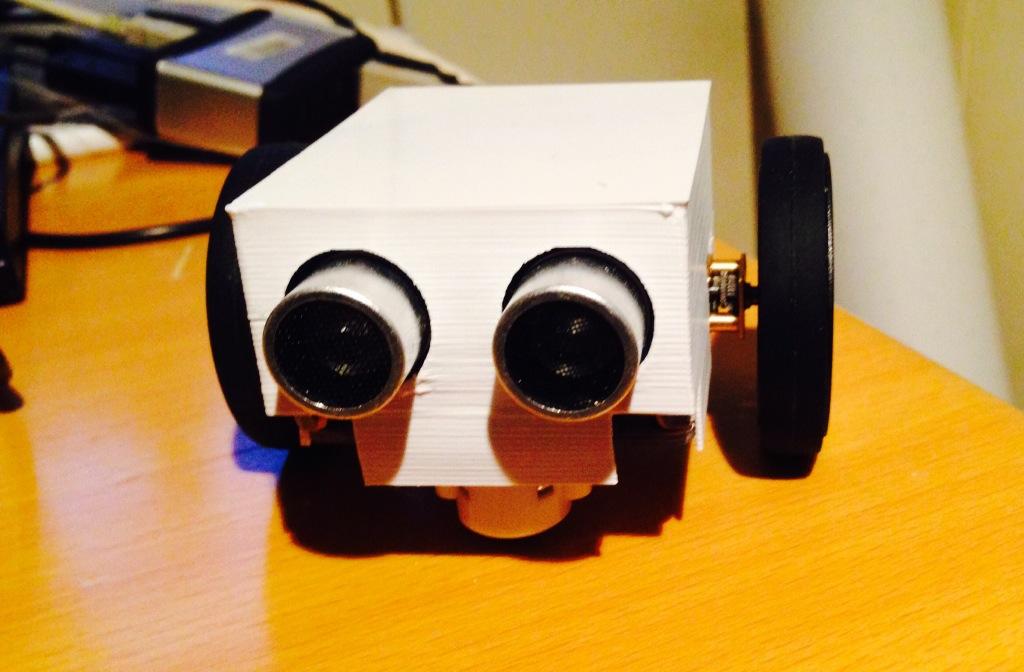
- Ultrasonic distance sensor
- N20 size, metal geared motors
- 42mm wheels
- Provided ready soldered. Just screw in your Pi and add batteries.
It really is as easy as Pi to get going in robotics now.
Competition entries (in order of appearance)
- mA+rvin – @MarkSwashplate
- Colin – @newsliner
- Pi2Go Nano – @monkeymademe
- Pi2Go mini – @monkeymademe
- Eric – @Mruktechreviews
- Ratbot (rA+bot) – @monkeymademe
- picabot – @TommyBobbins
- nitbit – @monkeymademe
- berryBot – @monkeymademe
- HatBot (hA+bot) – @monkeymademe
- DiddyTron – @AverageManvsPi
- DiddyBot – @AverageManvsPi
- A+ PiBot nano – @BitSkils
- The Crumb – @AverageManvsPi
- The Mighty Maus – @heeedt
- PiBotA+ – @skinnermartin78
- GoA+Bot (GoAtBot) – @skinnermartin78
- NanoGo – @skinnermartin78
- Johnny – @Ascii211
- MadgeBot – @ukscone
- BiBot – @JarrowComputing
- DinkyBot – @skinnermartin78
- MidiBot – @skinnermartin78
- +SonicBot – @CoderDojoCarm
- BotAplus – @treefrog52
- BotAppi (BotA+Pi) – @AndyBateyPi
- A4 – @sej7278
- A Robot – @sej7278
- PiBot – @TeCoEd
- Alfie – @richard007_1999
- AtBot (A+Bot) – @uk_baz
- Flat Stanley – @uk_baz
- 4tA+v1 – @uk_baz
- HalfPint – @skinnermartin78
- Swarmer – @zosho
- NA+Bot (NatBot) – @skinnermartin78
- Pip – @skinnermartin78
- BitBot – @skinnermartin78
- DotBot – @skinnermartin78
- A+Go – @skinnermartin78
- A+GoBot – @skinnermartin78
- Rudolph – @CoderDojoCarm
- RaspAπbot – @skinnermartin78
- JittyBot – @JarJarGeek
- Pi-onic – @red_dragon25
- PocketBot, PocA+Bot – @skinnermartin78
- PiAbot – @RobertsDavidJ
- PiAtron – @RobertsDavidJ
- PintBot – @recantha
- AGOBO – @mcampbelluni
- PiAGoGo – @mcampbelluni
- KinderBot – @APChristie
- SchoolieBot – @APChristie
- IKnowBot – @APChristie
- DeBug – @RobertsDavidJ
- aRobot – @Stimmli
- rA+pless (ripless) – @MBDilaver
- PiPlusBot – @Cloud4Schools
- RoboPip – @StefanPlum
- piDestroyer – @evgeniyraev
- pupPi- @evgeniyraev
- HAL 1- @evgeniyraev
- a1- @evgeniyraev
- Dalek- @evgeniyraev
- BugPi – @skeletony
- BuggyPi – @skeletony
- PiAGo – @skinnermartin78
- PiAGoBot – @skinnermartin78
- FrogBot – @AndyBateyPi
- PiFrogBot – @AndyBateyPi
- Piccolo – @ukscone
- amphipian – @AndyBateyP
- ampibot – @AndyBateyP
- apphibian – @AndyBateyP
- appibian – @AndyBateyP
- MidiBot – @skinnermartin78
- MidiTron – @skinnermartin78
- Medius – @skinnermartin78
- 4tronix build BotAplus – @treefrog52
Finalists (in Order)
- AGOBO – @mcampbelluni WINNER
- Piccolo – @ukscone
- NanoGo – @skinnermartin78
- mA+rvin – @MarkSwashplate
- Pi-onic – @red_dragon25
- BotAppi (BotA+Pi) – @AndyBateyPi
- HatBot (hA+bot) – @monkeymademe
- BotAplus – @treefrog52