Some early Info About the Picobot Robotics Project

I’ve been working on and off for a while on a small robot because:
- I want to make available a really cheap programmable robot for schools
- I would like to make one that can communicate with other robots, detect them and interact with them
- If they can be made cheaply enough then making a swarm of 10 or more becomes feasible


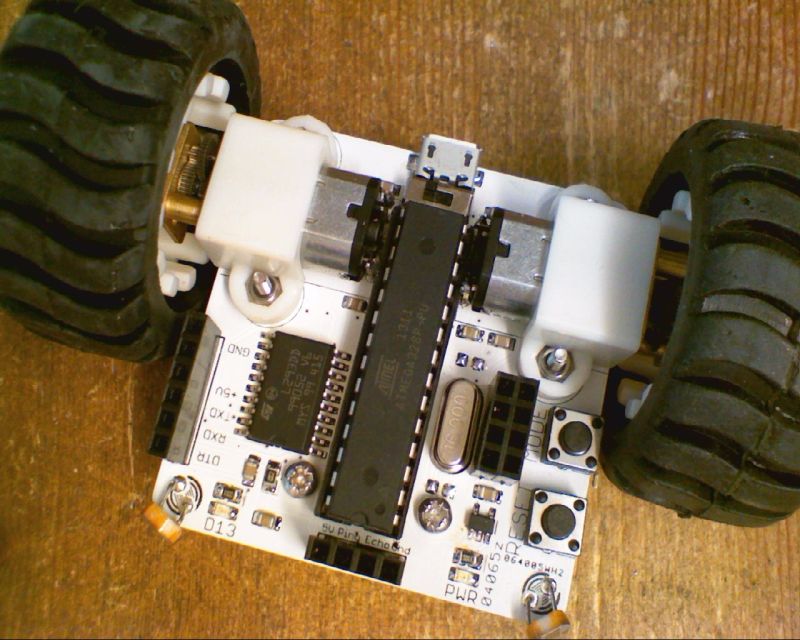
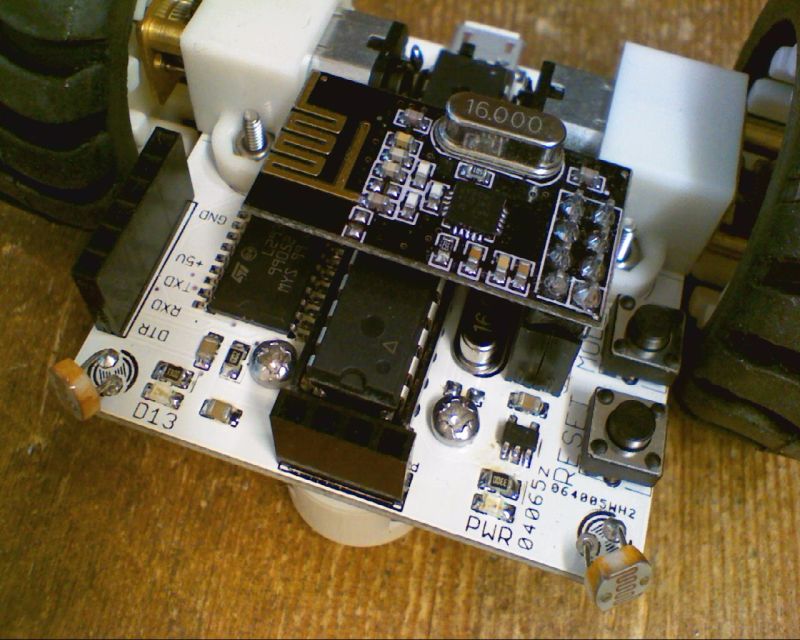




This version of Picobot (V2) contains a small number of sensors as well as a connector for an NRF24L01 2.4GHz RF module. This is stupidly cheap RF module with a reasonable range and excellent support in the Arduino community.
- Dimensions of PCB 50 x 50mm
- Motors: 2 x N20 size with 70:1 reduction gears
- Wheels: 42mm diameter
- Front ball caster
- ATmel ATMega328P -PU(DIP) controller chip with Arduino bootloader
- Interface to CP2102 USB-serial converter (with auto-reset). Only one converter required for all your bots, no need to waste money (and board space) having one for each
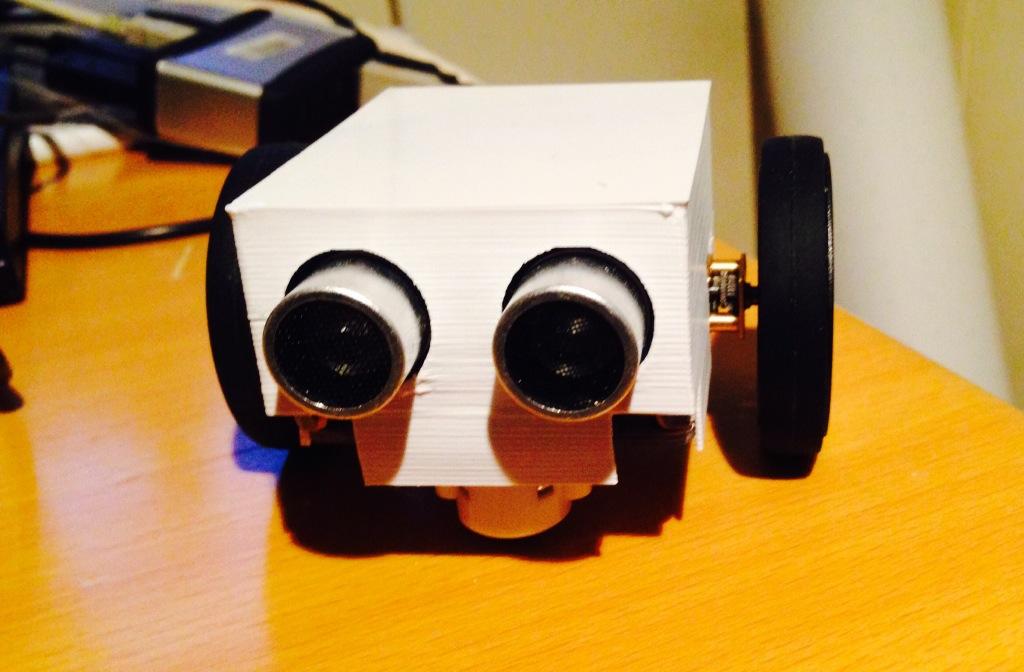
- Plug in socket for HC-SR04 ultrasonic distance sensor
- 2 x LDR for light level sensors
- Reset switch
- Mode select switch (use in your programs how you like)
- Micro-USB for power only – will work from 3.7V to 5.5V
- On-Off switch
Next Revision is V3 – Updated Info
V3 adds the following – keeping the PCB the same size
- TQFP package for the ATMega328P-AU (smaller, surface mount)
- 2 x IR line follower sensors
- 2 x RGB LEDs underneath at front
- Rear bright white LED, used for follow-the-leader swarming
- Change to use of 2-pin JST connector for direct powering from 3.7V Lipo battery
- New, thinner 47mm diameter wheels
